|
|
||
|---|---|---|
| Go2Py | ||
| deploy | ||
| docs | ||
| examples | ||
| msg_sources | ||
| .gitignore | ||
| Dockerfile.dock | ||
| Dockerfile.robot | ||
| LICENSE | ||
| MANIFEST.in | ||
| Makefile | ||
| README.md | ||
| go2py.sh | ||
| pin_model.ipynb | ||
| req.py | ||
| rl_environment.yml | ||
| setup.cfg | ||
| setup.py | ||
README.md
Go2Py
Go2Py is a Pythonic interface and driver for low-level and high-level control of Unitree Go2 quadruped robots. The motivation of this project is to ease the burden of initial interface development, safety systems of Go2 quadruped by providing a modular pipeline for real-time communication with the robot in both simulated and real world with a unified interface.
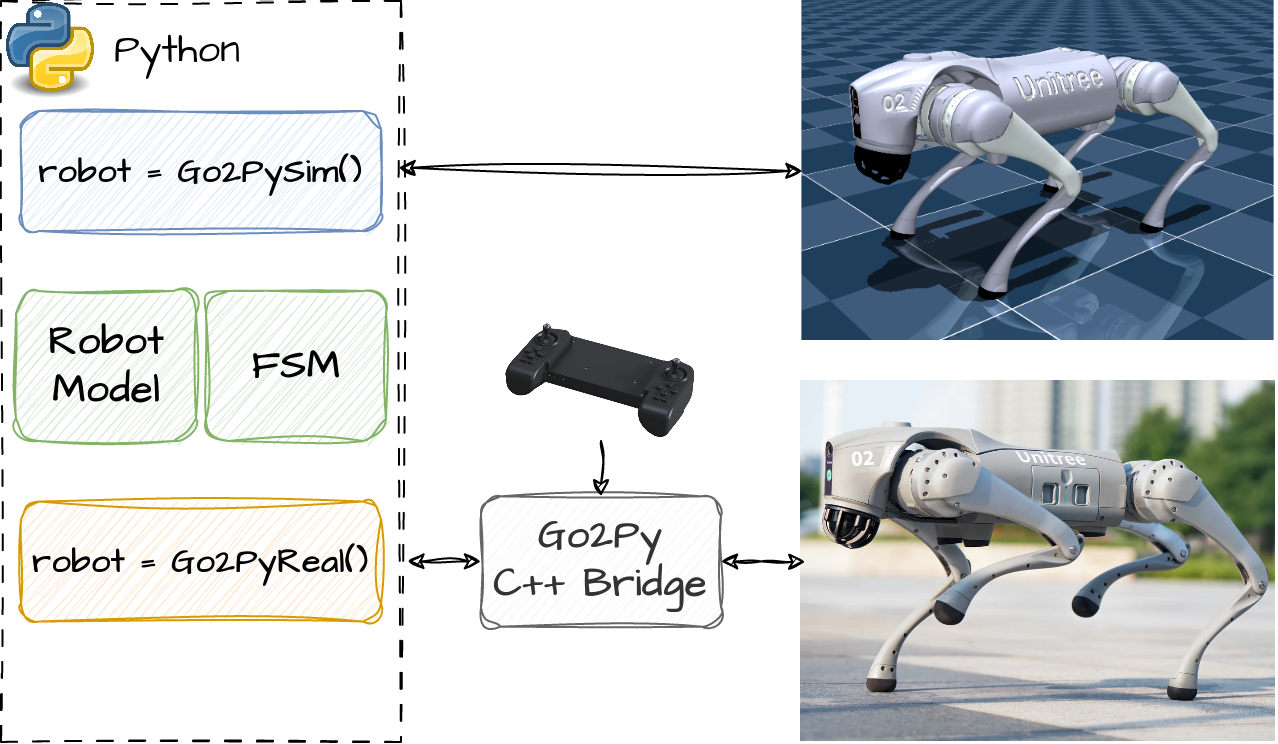
This project is comprised of the following components:
- C++ Bridge: A dockerized ROS2 bridge built upon the unitree_ros2 that implements a remote controlled emergency stop and publishes the robot states as standard ROS2 topics usable by upstream systems such as NAV2.
- Robot Interface: A simple Python class that represents the robot and communicates with the C++ bridge through either DDS (ROS independent) or ROS2 interfaces.
- Robot Management FSM: A finite state machine for controlling the behavior of the robot up to the point of handover to the user low-level controller (sitting down, standing up) with safety monitors (motor temperatures, emergency stops).
- Robot Model: A simple to use Pinocchio wrapper for computing the kinematics and dynamics parameters of the robot.
- Simulation Interface: Simulation environments based on Mujoco and Nvidia Orbit (To be added) with a Python interface identical to the real robot.
How Does Using it Look Like?
Communication with the robot will be as simple as importing a Python class:
from Go2Py.robot.interface.dds import GO2Real
from Go2Py.robot.model import Go2Model
robot = GO2Real(mode='lowlevel')
model = Go2Model()
robot.standDownReset()
while running:
joint_state = robot.getJointStates()
imu = robot.getIMU()
remote = robot.getRemoteState()
model.update(state['q'], state['dq'],T,vel) # T and vel from the EKF
info = model.getInfo()
#User control computations ...
robot.setCommands(q_des, dq_des, kp, kd, tau_ff)
An identical workflow is can be followed for simulation:
from Go2Py.sim.mujoco import Go2Sim
from Go2Py.robot.model import Go2Model
robot = Go2Sim()
model = Go2Model()
robot.standDownReset()
while running:
joint_state = robot.getJointStates()
imu = robot.getIMU()
remote = robot.getRemoteState()
model.update(state['q'], state['dq'],T,vel) # T and vel from the EKF
info = model.getInfo()
#User control computations ...
robot.setCommands(q_des, dq_des, kp, kd, tau_ff)
robot.step()
Installation
Follow through the steps in here to setup the robot and Go2Py.
Further Examples
A set of sorted examples are provided in the examples directory to get you up and running quickly:
- High-level body velocity interface (ROS2)
- High-level body velocity interface (DDS)
- Low-level joint interface (ROS2)
- Low-level joint interface (DDS)
- Low-level simulation interface
- Contact Force Estimation
- Foot Contact Estimation
- Extended Kalman Filter Legged Inertial State Estimator
- Walk These Ways RL Controller