|
|
||
|---|---|---|
| .. | ||
| EXP | ||
| README.assets | ||
| llm_test | ||
| others | ||
| utils | ||
| BTExpansionAlgorithm.py | ||
| BTExpansionAlgorithm_old.py | ||
| BehaviorTree.py | ||
| Examples.py | ||
| MakeCoffee.ptml | ||
| OptimalBTExpansionAlgorithm.py | ||
| OptimalBTExpansionAlgorithm_single_goal.py | ||
| README.md | ||
| SoftdrinkCost.ptml | ||
| __init__.py | ||
| goal_states_unique.txt | ||
| main.py | ||
| test.py | ||
| test2.py | ||
| test3.py | ||
| tools.py | ||
README.md
代码说明
1. BehaviorTree.py 实现行为树叶子结点和非叶子结点的定义
- **Leaf **:表示叶节点,可以是动作(
act)或条件(cond)。 - ControlBT:代表可能包含控制节点的行为树。它们可以是选择器(
?)、序列(>)、动作节点(act)或条件节点(cond)。 - 上述两个类都包含
tick方法。
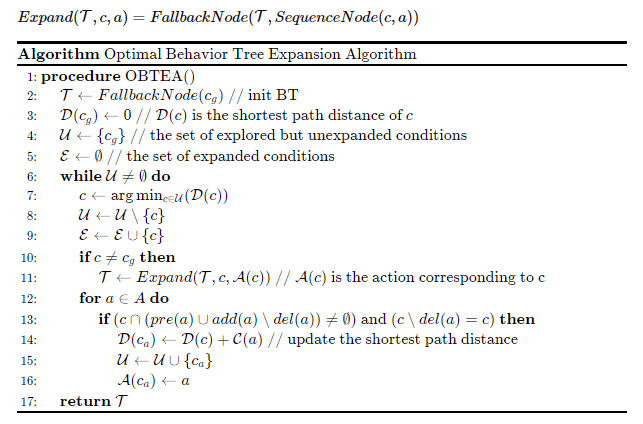
2. BTExpansionAlgorithm.py 实现最优行为树扩展算法
使用方法
algo = BTalgorithm(verbose=True)
algo.clear()
algo.run_algorithm(start, goal, actions) # 使用算法得到行为树在 algo.bt
algo.print_solution() # 打印行为树
val, obj = algo.bt.tick(state) # 执行行为树
3. tools.py 实现打印数据、行为树测试等模块
使用方法
print_action_data_table(goal,start,actions) # 打印所有变量
# 行为树鲁棒性测试,随机生成规划问题
# 设置生成规划问题集的超参数:文字数、解深度、迭代次数
seed=1
literals_num=10
depth = 10
iters= 10
BTTest(seed=seed,literals_num=literals_num,depth=depth,iters=iters)
4. Example.py 中设计规划案例 goals, start,actions
def MoveBtoB ():
actions=[]
a = Action(name="Move(b,ab)")
a.pre={'Free(ab)','WayClear'}
a.add={'At(b,ab)'}
a.del_set= {'Free(ab)','At(b,pb)'}
a.cost = 1
actions.append(a)
a=Action(name="Move(s,ab)")
a.pre={'Free(ab)'}
a.add={'Free(ab)','WayClear'}
a.del_set={'Free(ab)','At(s,ps)'}
a.cost = 1
actions.append(a)
a=Action(name="Move(s,as)")
a.pre={'Free(as)'}
a.add={'At(s,ps)','WayClear'}
a.del_set={'Free(as)','At(s,ps)'}
a.cost = 1
actions.append(a)
start = {'Free(ab)','Free(as)','At(b,pb)','At(s,ps)'}
goal= {'At(b,ab)'}
return goal,start,actions