3.8 KiB
3.8 KiB
代码说明
1. BehaviorTree.py 实现行为树叶子结点和非叶子结点的定义
- Leaf:表示叶节点,可以是动作(
act)或条件(cond)。 - ControlBT:代表可能包含控制节点的行为树。它们可以是选择器(
?)、序列(>)、动作节点(act)或条件节点(cond)。 - 上述两个类都包含
tick方法。
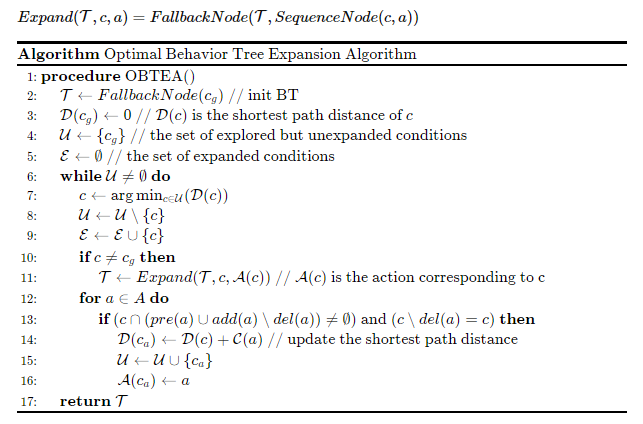
2. OptimalBTExpansionAlgorithm.py 实现最优行为树扩展算法
定义行动类
#定义行动类,行动包括前提、增加和删除影响
class Action:
def __init__(self,name='anonymous action',pre=set(),add=set(),del_set=set(),cost=1):
self.pre=copy.deepcopy(pre)
self.add=copy.deepcopy(add)
self.del_set=copy.deepcopy(del_set)
self.name=name
self.cost=cost
def __str__(self):
return self.name
调用算法
algo = OptBTExpAlgorithm(verbose=True)
algo.clear()
algo.run_algorithm(start, goal, actions) # 使用算法得到行为树在 algo.bt
algo.print_solution() # 打印行为树
val, obj = algo.bt.tick(state) # 执行行为树
algo.save_ptml_file("bt.ptml") # 保存行为树为 ptml 文件
3. tools.py 实现打印数据、行为树测试等模块
使用方法
print_action_data_table(goal,start,actions) # 打印所有变量
# 行为树鲁棒性测试,随机生成规划问题
# 设置生成规划问题集的超参数:文字数、解深度、迭代次数
seed=1
literals_num=10
depth = 10
iters= 10
BTTest(seed=seed,literals_num=literals_num,depth=depth,iters=iters)
4. example.py 中设计规划案例 goals, start, actions
def MoveBtoB ():
actions=[]
a = Action(name="Move(b,ab)")
a.pre={'Free(ab)','WayClear'}
a.add={'At(b,ab)'}
a.del_set= {'Free(ab)','At(b,pb)'}
a.cost = 1
actions.append(a)
a=Action(name="Move(s,ab)")
a.pre={'Free(ab)'}
a.add={'Free(ab)','WayClear'}
a.del_set={'Free(ab)','At(s,ps)'}
a.cost = 1
actions.append(a)
a=Action(name="Move(s,as)")
a.pre={'Free(as)'}
a.add={'At(s,ps)','WayClear'}
a.del_set={'Free(as)','At(s,ps)'}
a.cost = 1
actions.append(a)
start = {'Free(ab)','Free(as)','At(b,pb)','At(s,ps)'}
goal= {'At(b,ab)'}
return goal,start,actions
5. opt_bt_exp_main.py 为主函数,在此演示如何调用最优行为树扩展算法得到完全扩展最优行为树
初始化的时候:传入 actions (包含 pre,add,del,cost). 调用的时候,传入 goal 状态集合 (set类型),返回完全最优扩展行为树的 ptml 形式 (string类型)
actions=[
Action(name='PutDown(Table,Coffee)', pre={'Holding(Coffee)','At(Robot,Table)'}, add={'At(Table,Coffee)','NotHolding'}, del_set={'Holding(Coffee)'}, cost=1)
…………
]
algo = BTOptExpInterface(actions)
goal = {'At(Table,Coffee)'}
ptml_string = algo.process(goal,start)
print(ptml_string)
两种检测方法,用于检测当前状态 start 能否到达目标状态 goal
# 判断初始状态能否到达目标状态
start = {'At(Robot,Bar)', 'Holding(VacuumCup)', 'Available(Table)', 'Available(CoffeeMachine)','Available(FrontDesk)'}
# 方法一:算法返回所有可能的初始状态,在里面看看有没有对应的初始状态
right_bt = algo.find_all_leaf_states_contain_start(start)
if not right_bt:
print("ERROR1: The current state cannot reach the goal state!")
else:
print("Right1: The current state can reach the goal state!")
# 方法二:预先跑一边行为树,看能否到达目标状态
right_bt2 = algo.run_bt_from_start(goal,start)
if not right_bt2:
print("ERROR2: The current state cannot reach the goal state!")
else:
print("Right2: The current state can reach the goal state!")