3.8 KiB
实物部署
本代码可以在实物部署训练的网络。目前支持的机器人包括 Unitree G1, H1, H1_2。
| G1 | H1 | H1_2 |
|---|---|---|
 |
 |
 |
启动用法
python deploy_real.py {net_interface} {config_name}
net_interface: 为连接机器人的网卡的名字,例如enp3s0config_name: 配置文件的文件名。配置文件会在deploy/deploy_real/configs/下查找, 例如g1.yaml,h1.yaml,h1_2.yaml。
启动过程
1. 启动机器人
将机器人在吊装状态下启动,并等待机器人进入 零力矩模式
2. 进入调试模式
确保机器人处于 零力矩模式 的情况下,按下遥控器的 L2+R2组合键;此时机器人会进入调试模式, 调试模式下机器人关节处于阻尼状态。
3. 连接机器人
使用网线连接自己的电脑和机器人上的网口。修改网络配置如下
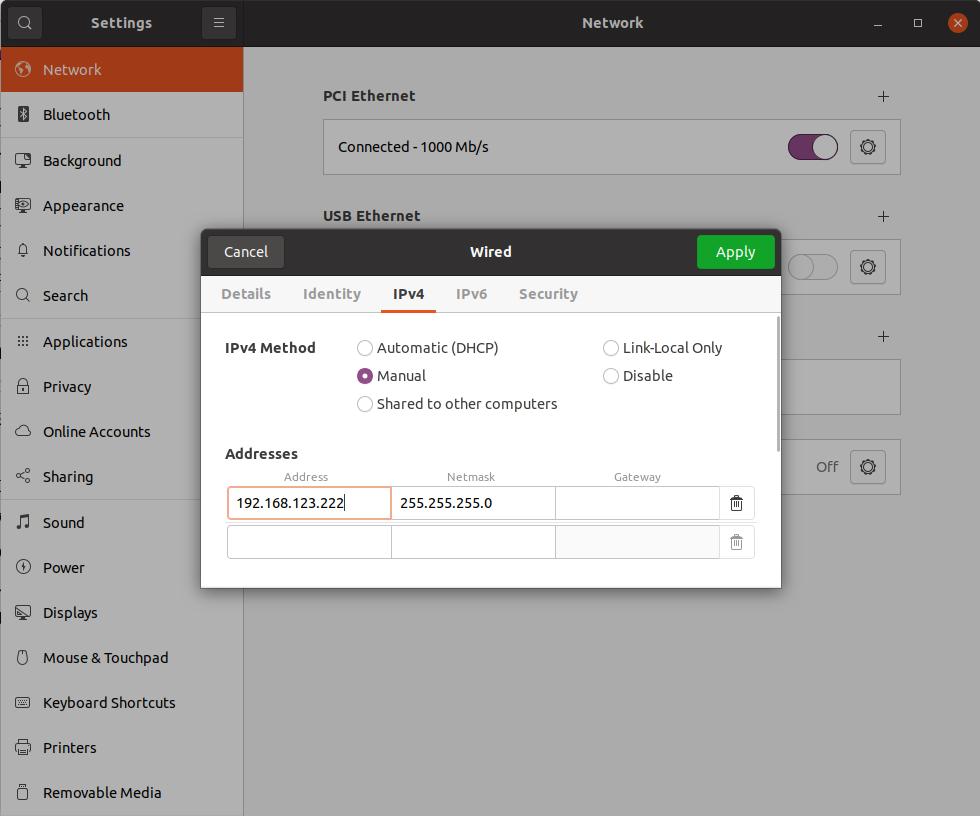
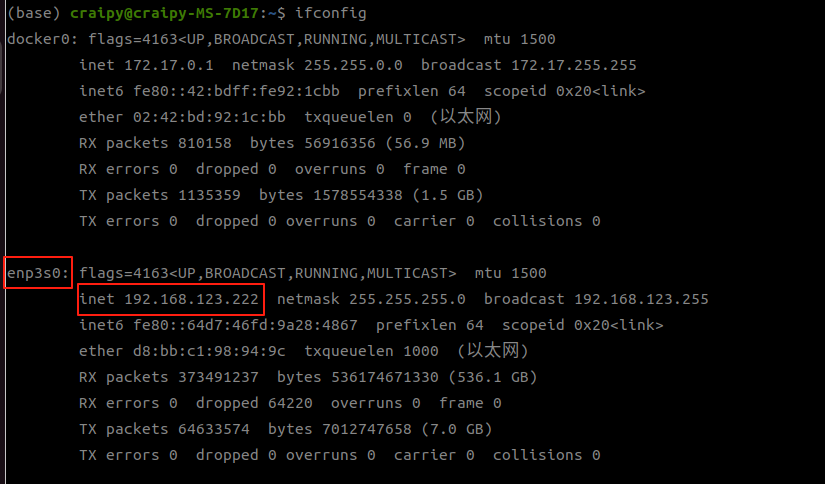
然后使用 ifconfig 命令查看与机器人连接的网卡的名称。网卡名称记录下来,后面会作为启动命令的参数
4. 启动程序
假设目前与实物机器人连接的网卡名为enp3s0.以G1机器人为例,执行下面的命令启动
python deploy_real.py enp3s0 g1.yaml
4.1 零力矩状态
启动之后,机器人关节会处于零力矩状态,可以用手晃动机器人的关节感受并确认一下。
4.2 默认位置状态
在零力矩状态时,按下遥控器上的start按键,机器人会运动到默认关节位置状态。
在机器人运动到默认关节位置之后,可以缓慢的下放吊装机构,让机器人的脚与地面接触。
4.3 运动控制模式
准备工作完成,按下遥控器上A键,机器人此时会原地踏步,在机器人状态稳定之后,可以逐渐降低吊装绳,给机器人一定的活动空间。
此时使用遥控器上的摇杆就可以控制机器人的运动了。 左摇杆的前后,控制机器人的x方向的运动速度 左摇杆的左右,控制机器人的y方向的运动速度 右摇杆的左右,控制机器人的偏航角yaw的运动速度
4.4 退出控制
在运动控制模式下,按下遥控器上 select 按键,机器人会进入阻尼模式倒下,程序退出。或者在终端中 使用 ctrl+c 关闭程序。
注意:
由于本示例部署并非稳定的控制程序,仅用于示例作用,请控制过程尽量不要给机器人施加扰动,如果控制过程中出现任何意外情况,请及时退出控制,以免发生危险。
视频教程
部署在G1上:https://oss-global-cdn.unitree.com/static/ff70a257ddf34adbb67733d8a90b24d4.mp4
部署在H1上:https://oss-global-cdn.unitree.com/static/6dae1756f4214409a5ced7386ca011ae.mp4
部署在H1_2上:https://oss-global-cdn.unitree.com/static/9d61a1470d3e4b9a9af6d131324fcb94.mp4