|
|
||
|---|---|---|
| .. | ||
| doc | ||
| launch | ||
| meshes | ||
| mjcf | ||
| urdf | ||
| CMakeLists.txt | ||
| README.md | ||
| package.xml | ||
README.md
Unitree H1 Description (URDF & MJCF)
Overview
This package includes a streamlined robot description (URDF & MJCF) for the H1 Humanoid Robot, developed by Unitree Robotics.
The file urdf/h1.urdf is description for H1 without hands, and urdf/h1_with_hand.urdf for H1 with dexterous hands. For IsaacGym users, please the file with _isaacgym.urdf to avoid some visualization issues.
Basic H1 Humanoid have 19 joints:
root [⚓] => /pelvis/
left_hip_yaw_joint [⚙+Z] => /left_hip_yaw_link/
left_hip_roll_joint [⚙+X] => /left_hip_roll_link/
left_hip_pitch_joint [⚙+Y] => /left_hip_pitch_link/
left_knee_joint [⚙+Y] => /left_knee_link/
left_ankle_joint [⚙+Y] => /left_ankle_link/
right_hip_yaw_joint [⚙+Z] => /right_hip_yaw_link/
right_hip_roll_joint [⚙+X] => /right_hip_roll_link/
right_hip_pitch_joint [⚙+Y] => /right_hip_pitch_link/
right_knee_joint [⚙+Y] => /right_knee_link/
right_ankle_joint [⚙+Y] => /right_ankle_link/
torso_joint [⚙+Z] => /torso_link/
left_shoulder_pitch_joint [⚙+Y] => /left_shoulder_pitch_link/
left_shoulder_roll_joint [⚙+X] => /left_shoulder_roll_link/
left_shoulder_yaw_joint [⚙+Z] => /left_shoulder_yaw_link/
left_elbow_joint [⚙+Y] => /left_elbow_link/
right_shoulder_pitch_joint [⚙+Y] => /right_shoulder_pitch_link/
right_shoulder_roll_joint [⚙+X] => /right_shoulder_roll_link/
right_shoulder_yaw_joint [⚙+Z] => /right_shoulder_yaw_link/
right_elbow_joint [⚙+Y] => /right_elbow_link/
Usages
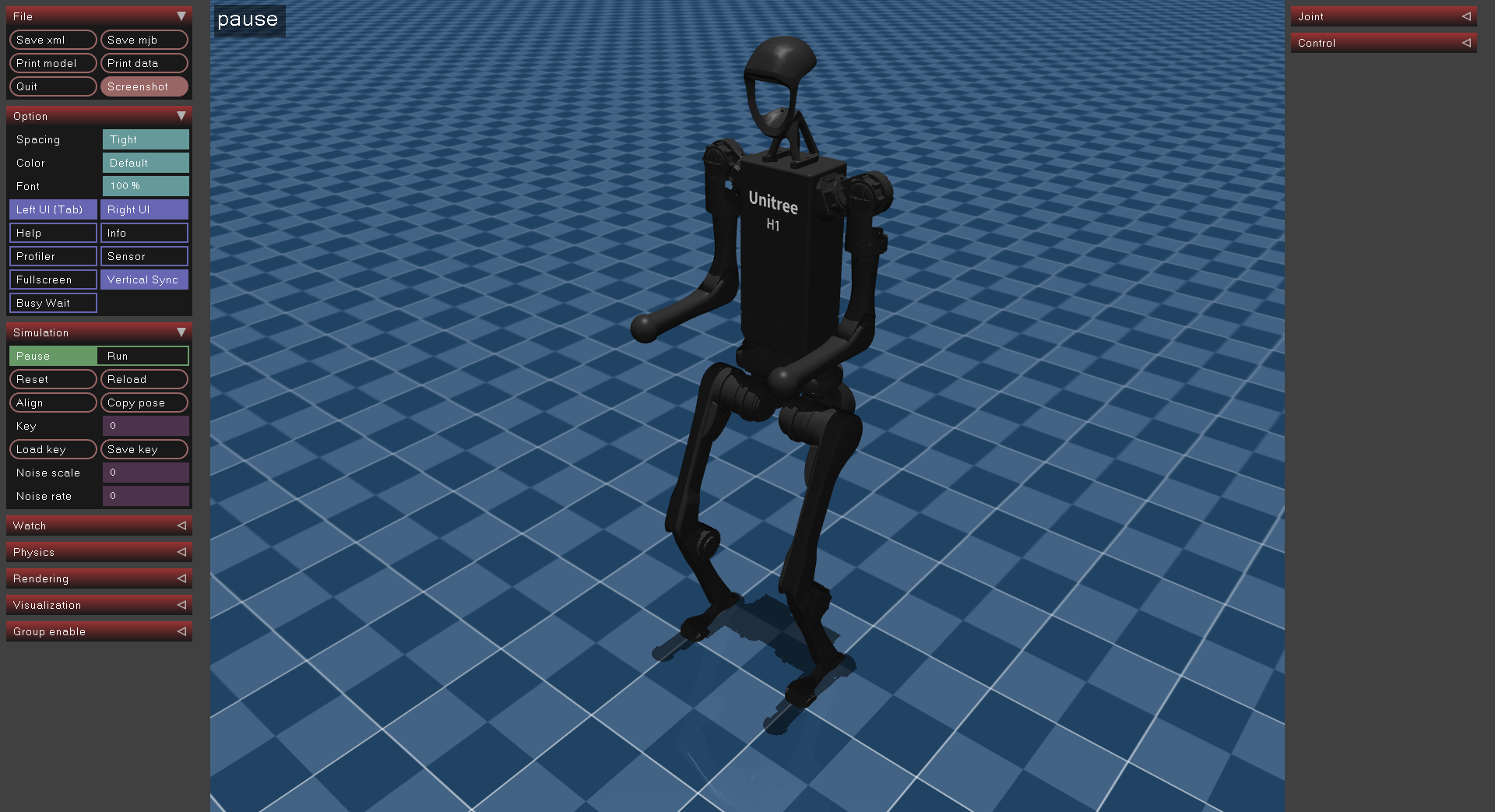
MuJoCo(recommend)
pip install mujoco
python -m mujoco.viewer --mjcf=mjcf/scene.xml
RViz
roslaunch h1_description display.launch
Gazebo
roslaunch h1_description gazebo.launch