|
|
||
|---|---|---|
| images | ||
| legged_gym | ||
| rsl_rl | ||
| .gitattributes | ||
| .gitignore | ||
| LICENSE | ||
| README.md | ||
README.md
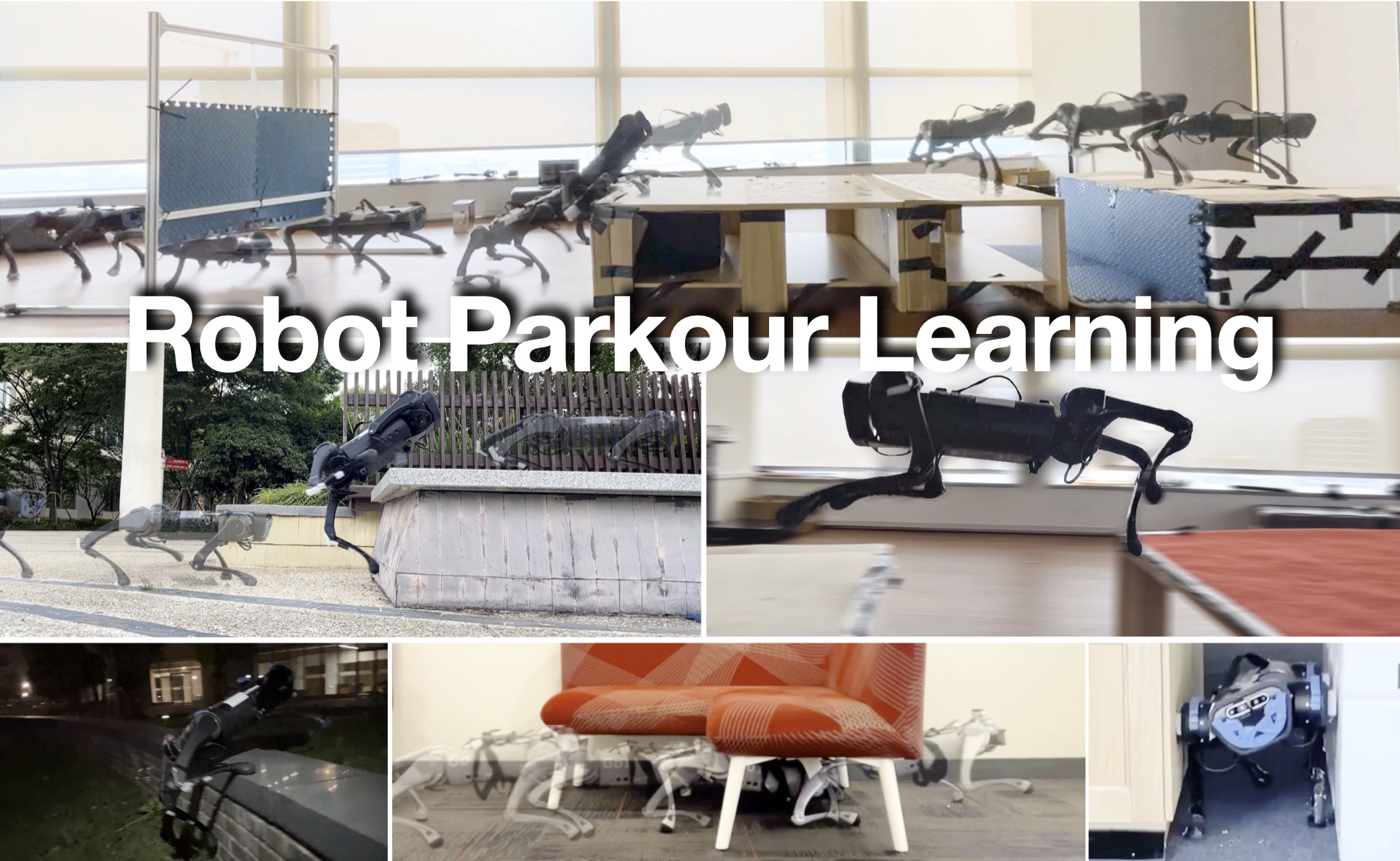
Robot Parkour Learning
Project website: https://robot-parkour.github.io/
Core Team:
Ziwen Zhuang*,
Zipeng Fu*,
Chelsea Finn,
Hang Zhao
with:
Jianren Wang,
Christopher Atkeson,
Sören Schwertfeger
Conference on Robot Learning (CoRL) 2023, Oral
Repository Structure
legged_gym: contains the isaacgym environment and config files.legged_gym/legged_gym/envs/a1/: contains all the training config files.legged_gym/legged_gym/envs/base/: contains all the environment implementation.legged_gym/legged_gym/utils/terrain/: contains the terrain generation code.
rsl_rl: contains the network module and algorithm implementation. You can copy this folder directly to your robot.rsl_rl/rsl_rl/algorithms/: contains the algorithm implementation.rsl_rl/rsl_rl/modules/: contains the network module implementation.
Training in Simulation
To install and run the code for training A1 in simulation, please clone this repository and follow the instructions in legged_gym/README.md.
Hardware Deployment
TODO
Trouble Shooting
If you cannot run the distillation part or all graphics computing goes to GPU 0 dispite you have multiple GPUs and have set the CUDA_VISIBLE_DEVICES, please use docker to isolate each GPU.
To Do (will be done before Nov 2023)
- Go1 training pipeline in simulation
- A1 deployment code
- Go1 deployment code
Citation
If you find this project helpful to your research, please consider cite us! This is really important to us.
@inproceedings{
zhuang2023robot,
title={Robot Parkour Learning},
author={Ziwen Zhuang and Zipeng Fu and Jianren Wang and Christopher G Atkeson and S{\"o}ren Schwertfeger and Chelsea Finn and Hang Zhao},
booktitle={Conference on Robot Learning {CoRL}},
year={2023}
}