* latest environments will follow |
||
|---|---|---|
| go1_ckpts | ||
| images | ||
| legged_gym | ||
| onboard_script | ||
| rsl_rl | ||
| .gitattributes | ||
| .gitignore | ||
| Deploy.md | ||
| LICENSE | ||
| README.md | ||
README.md
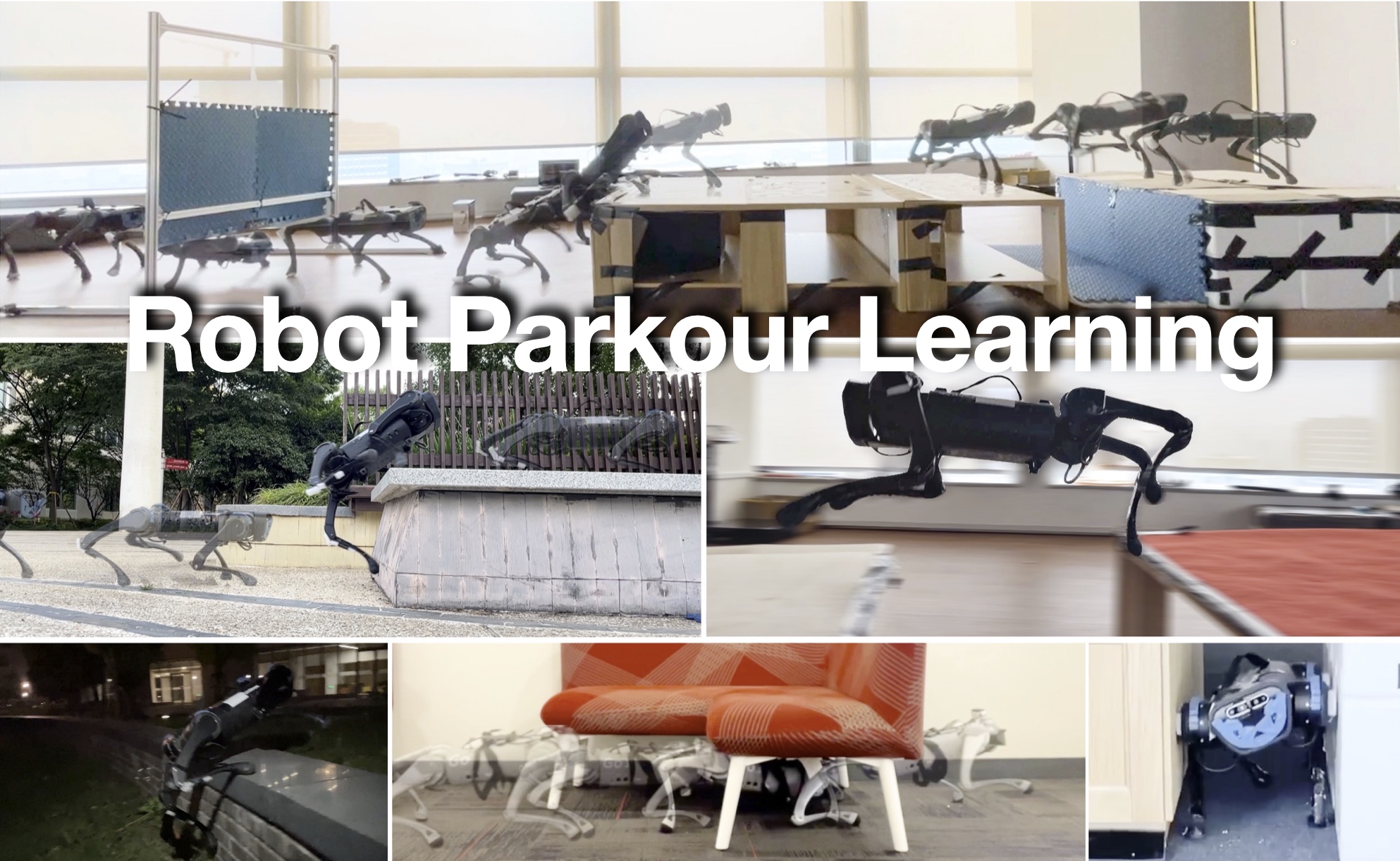
Robot Parkour Learning
Project website: https://robot-parkour.github.io/
Authors:
Ziwen Zhuang*,
Zipeng Fu*,
Jianren Wang,
Christopher Atkeson,
Sören Schwertfeger,
Chelsea Finn,
Hang Zhao
Conference on Robot Learning (CoRL) 2023, Oral
Repository Structure
legged_gym: contains the isaacgym environment and config files.legged_gym/legged_gym/envs/a1/: contains all the training config files.legged_gym/legged_gym/envs/base/: contains all the environment implementation.legged_gym/legged_gym/utils/terrain/: contains the terrain generation code.
rsl_rl: contains the network module and algorithm implementation. You can copy this folder directly to your robot.rsl_rl/rsl_rl/algorithms/: contains the algorithm implementation.rsl_rl/rsl_rl/modules/: contains the network module implementation.
Training in Simulation
To install and run the code for training A1 in simulation, please clone this repository and follow the instructions in legged_gym/README.md.
Hardware Deployment
To deploy the trained model on your real robot, please follow the instructions in Deploy.md.
Trouble Shooting
If you cannot run the distillation part or all graphics computing goes to GPU 0 dispite you have multiple GPUs and have set the CUDA_VISIBLE_DEVICES, please use docker to isolate each GPU.
To Do (will be done before Nov 2023)
- Go1 training pipeline in simulation
- A1 deployment code
- Go1 deployment code
Citation
If you find this project helpful to your research, please consider cite us! This is really important to us.
@inproceedings{
zhuang2023robot,
title={Robot Parkour Learning},
author={Ziwen Zhuang and Zipeng Fu and Jianren Wang and Christopher G Atkeson and S{\"o}ren Schwertfeger and Chelsea Finn and Hang Zhao},
booktitle={Conference on Robot Learning {CoRL}},
year={2023}
}